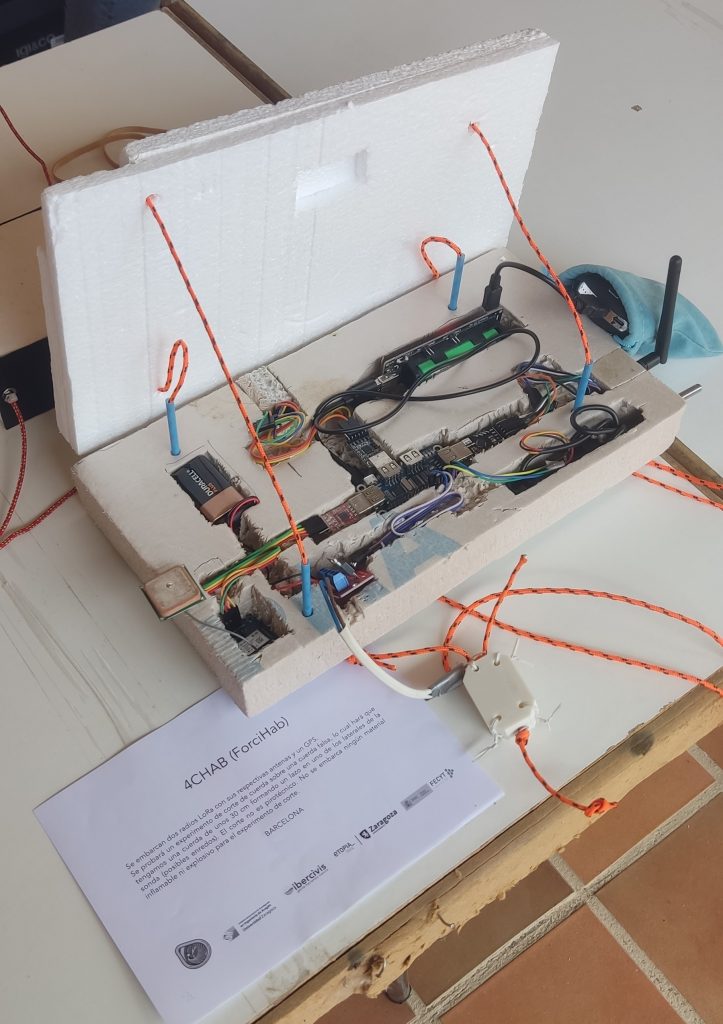
4CHAB (ForciHab)
Experimento TEL
El experimento de corte de cuerda no funcionó como se esperaba. La cuerda de ejemplo estaba sin cortar.
El principal motivo del fallo se debe a la descarga de la batería de 9V que se embarco para generar el corte. Se comprobó el estado de la batería y se descubrió que estaba totalmente descargada, a 7,64V. Lo normal serian 9,6V.
La exploración visual del recubrimiento del MOSFET utilizado indica que circulo corriente a través suyo durante un periodo de tiempo. Se calentó y fundió parcialmente el recubrimiento, pero nada importante. Esto indica que la corriente, a muy bajo voltaje, estuvo pasando a través suyo por un tiempo, pero fue insuficiente para generar ningún efecto.
Experimento 2C
El experimento funcionó parcialmente, ya que hasta 3000 metros se consiguió telemetría. Se sospecha que no se pudo más lejos por las antenas que se pusieron en la estación terrestre. Muy pequeñas.
Experimento Motor de Reglas
Funcionó perfectamente, el sistema generó los tokens de control según como estaba previsto.
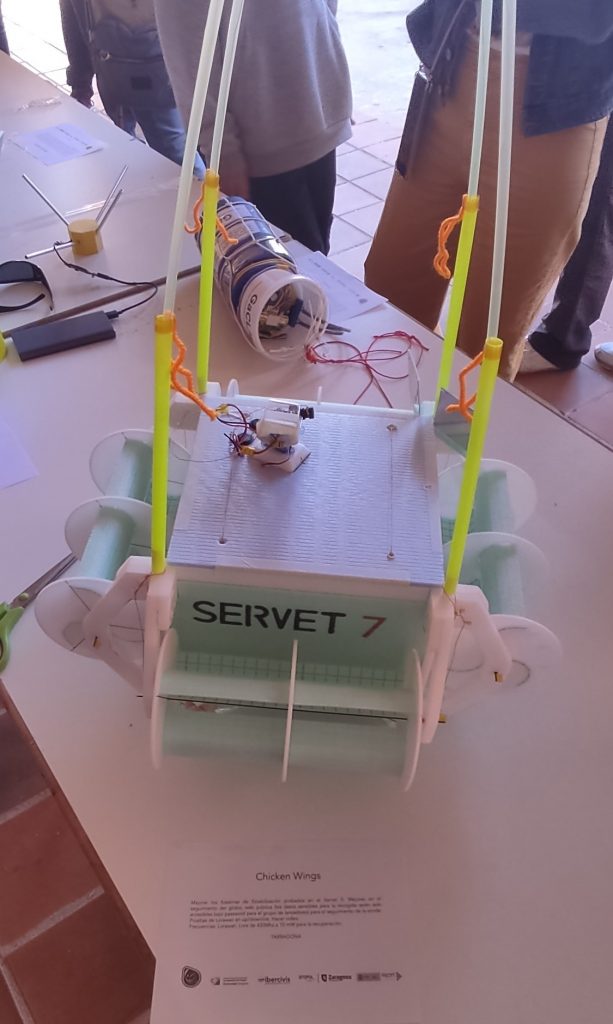
Chicken Wings (The Air and Space Box Program)
Biológicos
En el Servet 5 pudimos comprobar que las patatas sufren necrosis por engelamiento. Pero las legumbres deshidratadas sobreviven sin problemas a las bajas temperaturas y la radiación. La germinación de lentejas y un crecimiento equivalente a las muestras de control que se germinaron a la vez no se apreciaban diferencias. Este año se han subido semillas de Ginkgo Biloba que actualmente están estratificándose para germinarlas en primavera, para iniciar entonces el seguimiento comparado con las muestras de control.

Comunicaciones:
LoraWan conseguimos una cobertura bastante amplia a pesar de que por motivos de fallo en la configuración el dispositivo estuvo en silencio por encima de los 12000 metros. La cobertura fue prácticamente ininterrumpida durante el vuelo.

Lora
El dispositivo auxiliar de tan solo 10 mW funcionó muy bien complementando las señales de LoraWan e informando del status de la sonda.
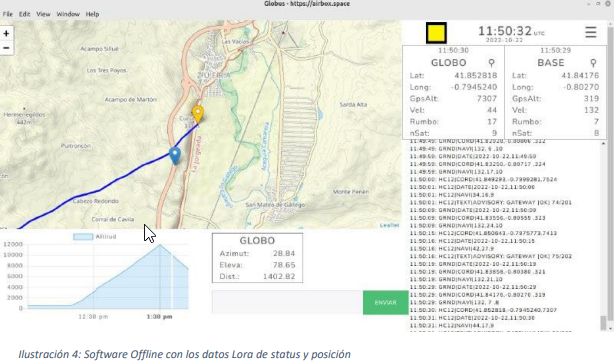
Seguimiento
El software de predicción hizo un cálculo muy acertado del lugar de impacto facilitándonos la recogida. El canal de Telegram para el seguimiento funcionó correctamente. El software offline de información del estatus de la sonda y su posición también funcionó correctamente. Ahora nos queda descargar los datos de la base de datos para revisión.

Sistema de Estabilización
El sistema de estabilización por efecto Magnus no funcionó como se esperaba. Los ejes de los rodillos acabaron muy desgastados y generaron resonancia en la sonda. Tenemos ya soluciones de mejora.

Audio y Vídeo
Las imágenes en alta resolución 2.1K y 60 fps nos han ayudado a entender lo sucedido en el vuelo y poder confirmar visualmente el funcionamiento propio y del resto de sondas del tren.

GaCLA (Greenhouse Gas Concentrations in the Lower Atmosphere)
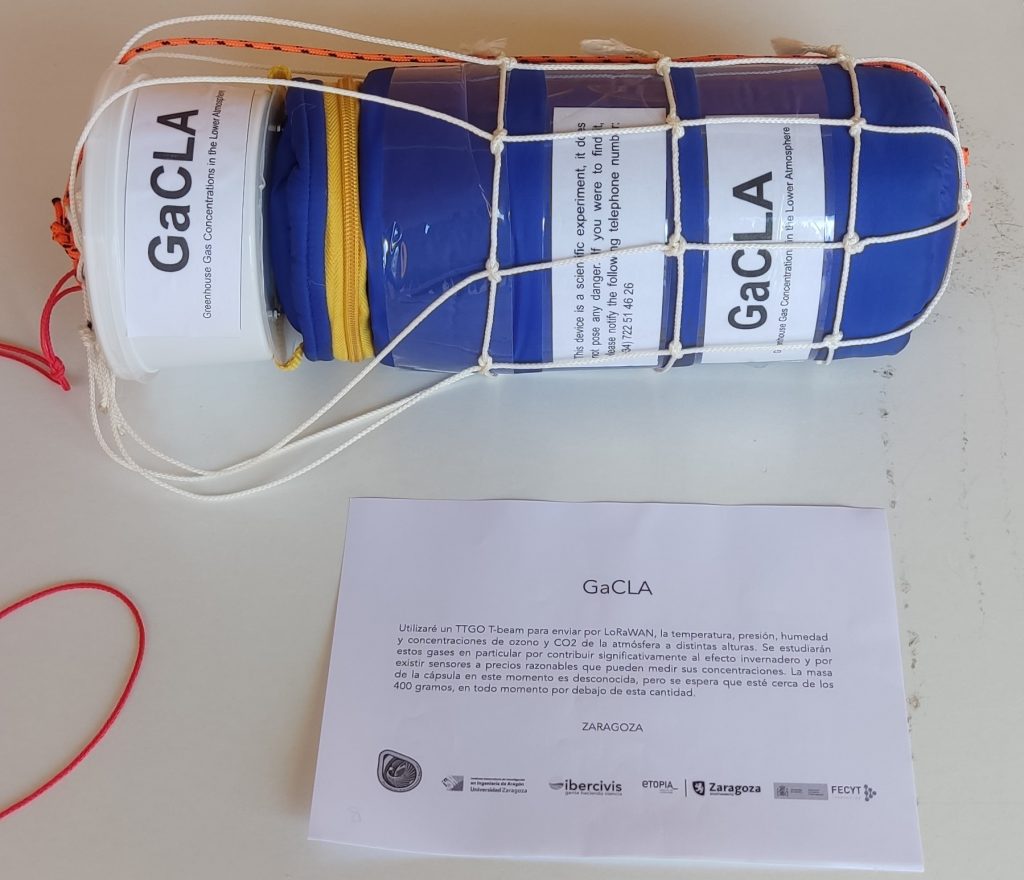
GaCLA (Greenhouse Gas Concentrations in the Lower Atmosphere) es un proyecto cuya finalidad es medir tres gases de efecto invernadero (dióxido de carbono, ozono y vapor de agua) a distintas alturas de la baja atmósfera. Para ello se creó una sonda que recogería estos datos además de temperatura, presión y localización GPS (latitud, longitud y altitud) para poder contextualizar los datos que se recogieran. Además de guardarse estos datos localmente, se envían por radiofrecuencia utilizando los protocolos LoRa y LoRaWAN.
La cápsula está compuesta de dos TTGO T-beam (microcontroladores basados en el ESP32 que además incorporan comunicación LoRa y LoRaWAN además de GPS) y los distintos sensores para medir los gases en cuestión: BME280 para medir la temperatura, presión y humedad relativa (a partir de la cual se puede obtener la concentración de vapor de agua); MH-Z14A para medir la concentración de dióxido de carbono; y ZE25-O3 para medir la proporción de ozono. Estos sensores se escogieron por su fiabilidad teniendo en cuenta su bajo coste, pues sensores que pudieran tomar mediciones más precisas costaban significativamente más (por encima de los 250€ cada uno) en el caso de los dos últimos.
El lanzamiento fue parcialmente satisfactorio: la sonda se pudo recuperar, todos los sensores recogieron datos y estos se guardaron y transmitieron por radio, pero los valores presentaron anomalías. En primer lugar, el sensor de CO2 no recogió datos por debajo de los 400 ppm pese a que supuestamente sí podía y posteriormente se observó cómo la concentración de dióxido de carbono sube con la altura, algo completamente opuesto a lo esperado. Además, el sensor de ozono recogió datos con mucha más variabilidad de la prevista a alturas bajas, por lo que las concentraciones obtenidas por el sensor no son
fidedignas.
Los problemas en las mediciones de CO2 pueden deberse a una mala programación por defecto del sensor por la cual no midiera bajas concentraciones. Por otro lado, los provenientes del sensor de ozono no están muy claros. Ambos sensores pudieron además dar valores extraños debido a mediciones cruzadas de otros gases y a las condiciones anormales de presión y temperatura encontradas durante la subida y bajada, puesto que están preparados para trabajar a presiones y temperaturas propias de la superficie terrestre.
En cualquier caso, los datos recogidos por los sensores de CO2 y O3 no están corregidos con la presión. Por las tecnologías de medición que usan, lo que miden es la concentración absoluta de estos gases y, tomando una presión atmosférica estándar, asumen la cantidad total de gas para hallar la concentración relativa que es la que devuelven (ppm de CO2 y ppb de O3). Debido a estas anomalías en los datos, se optó por no retocarlos para evitar añadir más orígenes de error.
Como conclusión, en caso de repetirse un experimento de medición de gases atmosféricos, se recomendaría a quienes lo fueran a realizar que optaran por utilizar sensores con tecnología óptica (que cuantifican la luz de una longitud de onda precisa que ha sido absorbida por el gas objetivo) y si fuera posible que contaran con alguna garantía del fabricante de que puedan funcionar a esas presiones y temperaturas.
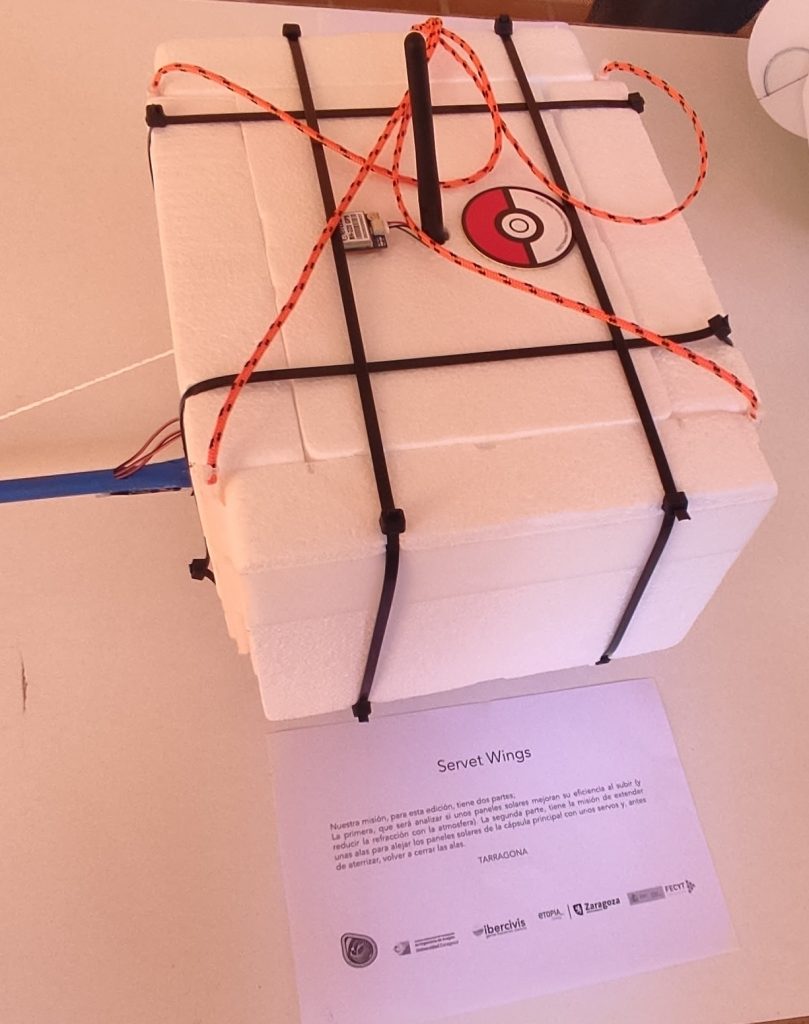
Servet Wings
Debido a problemas de última hora no hemos tenido grandes descubrimientos durante el vuelo, aun así, podemos confirmar que la radiación aumentó aunque poco, ya que no subió lo que a todos nos hubiera gustado. Por otro lado, intentamos buscar otros mini-experimentos:
La batería, sin ninguna protección térmica extra, hubiera dejado de dar energía al ordenador de aborto si se hubiera llegado a los 35 km de altitud.
Un simple sensor analógico sin chip funciona sin problemas con la baja temperatura y mantiene la precisión.
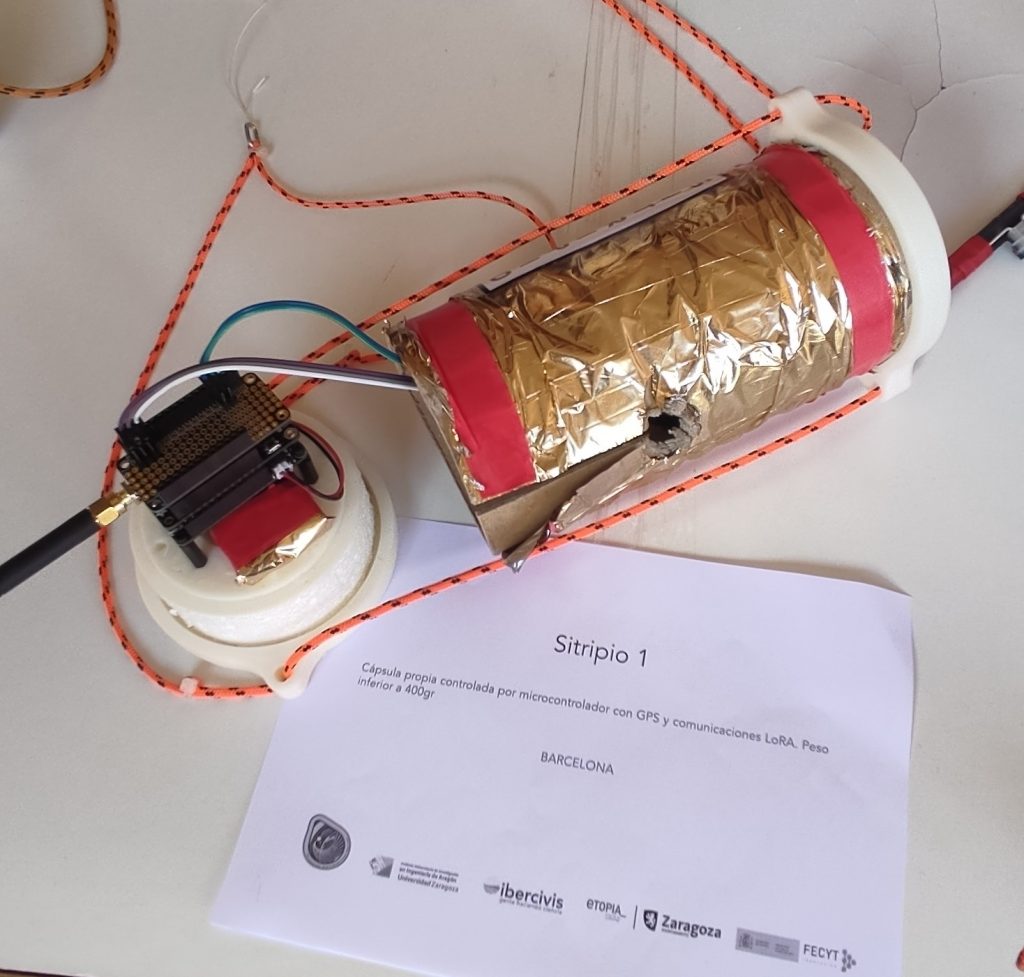
Sitripio 1
La cápsula Sitripio (Barcelona) pretendía ser un demostrador tecnológico de un microcontrolador de reciente creación, el RP2040, unido mediante un sistema de radiofrecuencia a la red LoRaWAN de The Things Network. La cápsula debía transmitir con muy poca potencia la temperatura interna del procesador y la posición GPS del sistema.
En las horas previas al lanzamiento hubo algún problema (todavía por determinar) con el módulo de radio y la sonda no pudo transmitir correctamente sus datos pero se ha comprobado que el ordenador de a bordo seguía funcionando después de su vuelo a través de la estratosfera.
Aunque un poco agridulce por el fallo imprevisto del módulo de radio, creemos que la misión ha sido casi un éxito completo al sobrevivir el sistema a las inclemencias de la estratosfera y el aterrizaje.
En futuros vuelos del Proyecto Servet se habrán solucionado los problemas de comunicación y podremos considerarlo un éxito completo.
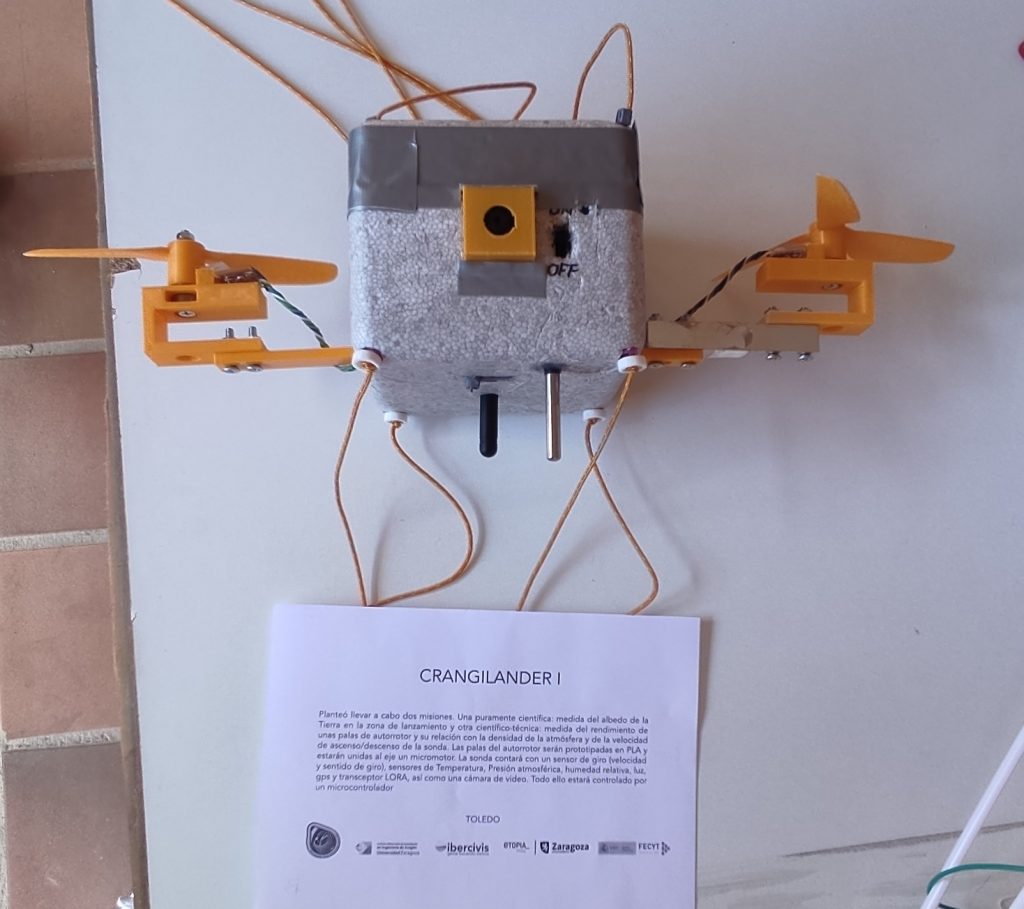
CRANGILANDER I
Mi selección en la convocatoria SERVET VII para desarrollar experimentos científicos y técnicos por parte de ciudadanos en entorno de gran altitud ha supuesto poner en práctica (o intentarlo) alguna de las ideas que me rondaban en la cabeza de cara a posibles aterrizajes autónomos de sondas.
El experimento principal era comprobar la capacidad de autofrenado de la cápsula empleando autorrotores, tal como se puede ver en este video didáctico de la NASA https://youtu.be/HrKRWsrZuYc
Para ello diseñé y construí una capsula que constaba de dos hélices, una de dos palas y otra de tres de forma que pudiera comprobar la diferencia de rendimiento entre los dos diseños medido en forma de velocidad angular de rotación.

Para medición de esta velocidad de rotación empleé dos encoders diseñados manualmente con sensores de efecto Hall A3144.
Además, la hélice de tres palas iba acoplada a una célula de carga con el fin de cuantificar el empuje de frenado producido por el efecto de rotación.
También estaba previsto, dentro de los experimentos de CRANGILANDER I, medir el albedo de la Tierra en estas latitudes, pero debido a que no encontré sensores de luz lo suficientemente fiables deseché realizar esta parte del experimento.
Además de medir las velocidades de rotación de las palas y el empuje ejercido sobre una de ellas (tripala), medimos los siguientes parámetros físicos:
- Posición (latitud, longitud, altitud) y hora: GPS Neo 6M
- Presión atmosférica: BMP180
- Temperatura interior de la cápsula: BMP180
- Temperatura exterior: DS18B20
De forma indirecta también medimos:
- Velocidad de ascenso/descenso
- Densidad del aire
La cápsula también incluía una minicámara, pero agotó su batería antes de iniciar el ascenso.
Para controlar todos estos sensores empleé un microcontrolador Teensy 3.5 que además tiene la posibilidad de guardar todos los datos obtenidos en una tarjeta microSD a modo de respaldo.

Además de guardar los datos de los sensores en la tarjeta de respaldo, estos se enviaban por LoRa 868 MHz cada 30 segundos a la estación de tierra. Esto se conseguía con un módulo Dorji DRF1276DM.
La estación de tierra consistía en otro de estos módulos conectado a un teléfono móvil que leía por el puerto serie las tramas de datos enviadas.
De las 208 tramas de datos enviadas se recibieron en tierra 166, lo que en mi parecer es un buen dato.
Estos han sido los datos más significativos del vuelo:
| Magnitud | Valor | Ud |
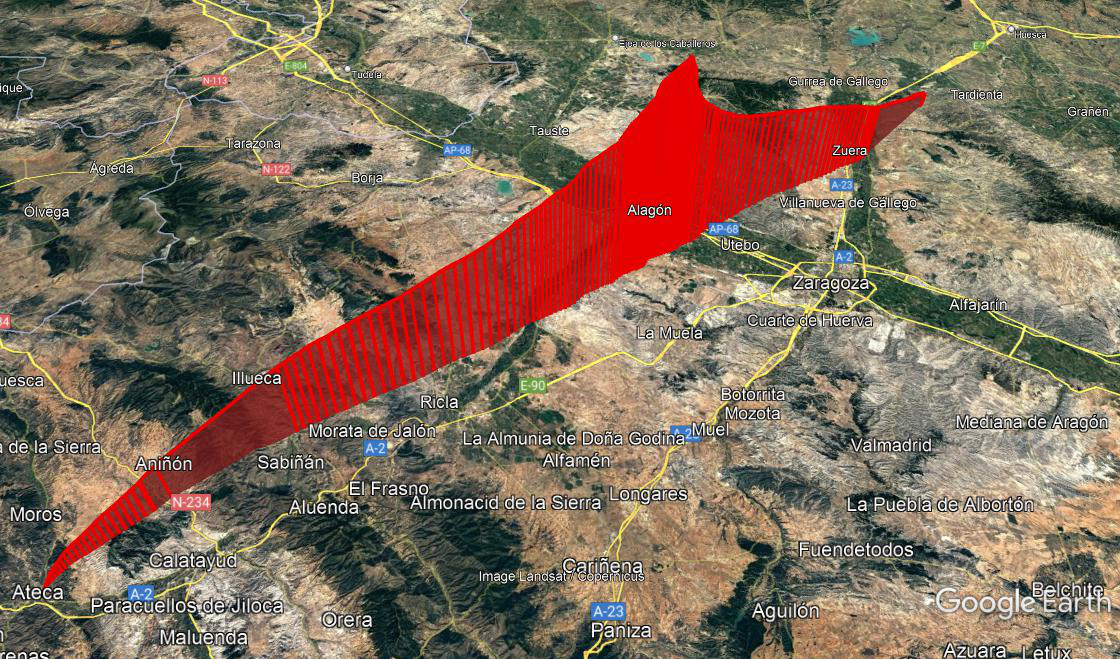
| Altitud salida | 595.3 | m |
| Altitud aterrizaje | 388.1 | m |
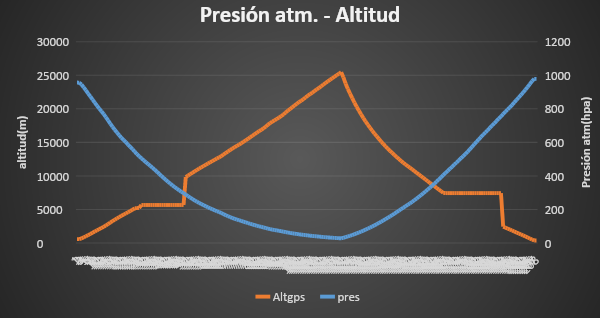
| Altitud máxima | 25455.4 | m |
| P atm. Superficie | 956.56 | hPa |
| P atm. mínima | 28.23 | hPa |
| Texterior superficie | 22.69 | ºC |
| Texterior mínima | -54.75 | ºC |
| Tinterior superifice | 33.2 | ºC |
| Tinterior mínima | -18.7 | ºC |
| T ascenso | 3643 | s |
| T descenso | 2696 | s |
| T total de vuelo | 6339 | s |
| Densidad aire superficie | 1.1264 | Kg/m3 |
| Densidad aire mínima | 0.0409 | Kg/m3 |
| V ascenso media | 6.83 | m/s |
| V descenso media | -9.30 | m/s |
| V rot. máxima tripala | 5927.5 | rpm |
| V rot. máxima bipala | 5017.5 | rpm |
| Empuje máx | 0.975296 | N |
| Empuje mín | -0.32389 | N |
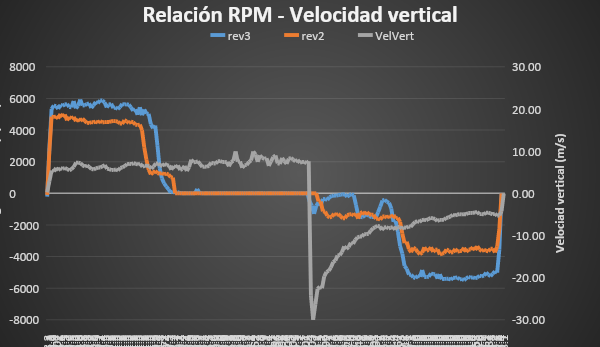
Unos cuantos gráficos asociados al experimento principal:
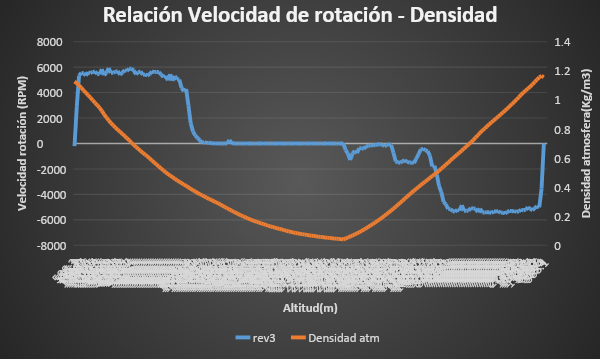
De la observación de los datos y gráficos obtenidos se puede comprobar que hubo un periodo durante el ascenso (de los 5671m a los 9839m) y durante el descenso (de los 7843m a los 2299m) en los que el gps dejó de enviar datos nuevos ya que pasó de recibir con 9 o 10 satélites a 0 en esos tramos. No encuentro justificación alguna a esta incidencia.
También el sensor de temperatura exterior DS18B20 dejó de marcar temperatura cuando se aproximó a las temperaturas mínimas recomendadas por el fabricante (en mi caso, tal vez por no ser un sensor “oficial” dejó de dar datos por debajo de -54.31ºC)
En cuanto a las velocidades de rotación de las palas, estas se mantienen más o menos constantes con relación a la velocidad de ascenso del globo, 5300rpm para la tripala y 4400rpm para la bipala. Ahora bien, en el momento que la densidad del aire baja de los 0.43 Kg/m3 la velocidad de rotación se desploma llegado a ser 0 rpm cuando la densidad del aire es de 0.35 Kg/m3.
Por todo ello, podemos concluir que el efecto de aerofrenado podría comenzar cuando la densidad del aire es de unos 0.5 Kg/m3, es decir a unos 8500m de altitud y alcanzar su régimen constante a los 7500m que es cuando se vuelven alcanzar las 5400rpm de media en la hélice tripala.
Lo que no he podido confirmar es que el empuje ejercido por el autorrotor sea suficiente para el frenado. Creo que ello es por un mal diseño en esta parte del experimento en varios aspectos. Uno de ellos es no haber tenido en cuenta que el sistema de la cápsula no era un sistema aislado al ir en el mismo tren que el resto de cápsulas y paracaídas y por tanto no ir en “caída libre” real. El otro problema, ha sido posiblemente las mediciones de la célula de carga, ya que no parecían muy consistentes a lo largo de todo el vuelo.
CONCLUSIÓN
El proyecto Servet VII me ha dado la oportunidad de poder llevar a cabo experiencias que sin el apoyo de organizaciones como Ibercivis sería difícil de hacer. Además, hacerlo junto con un grupo de ciudadanos con intereses similares de los cuales he aprendido mucho es un añadido nada despreciable.
PaPe3 + (uPape3A+uPape3B)
Cuando se lanzan picoglobos / picoballons desde tierra se suele usar muy poco helio, si usamos de más el globo explota y si se usa de menos el globo se va llenado de humedad que se convierte en hielo y hace que caiga.
El experimento consistía en transportar dos picoglobos con muy poco helio, ya que al subir propulsados por un globo de gran altitud al subir tan rápido se evitaría que se formara el peligroso hielo.
Con helio y una microsonda de apenas 10g se buscaba alcanzar alturas de unos 12km.
¿Qué hay de interesante a 12km?
Las corrientes de chorro, estas se encuentran entre los 9km y los 16km, y son un flujo de aire que circunvalan la tierra a velocidades entre los 90 y los 400 km/h.
Cuando un picoglobo alcanza uno de ellos puede circunvalar la tierra en tan solo unos días. Vídeo.
El diseñar un mecanismo que portara y libera una frágil sonda de 10g fue un reto y llevo más tiempo del que inicialmente había pensado, optando finalmente por diseño de pinzas accionado por un pequeño servo.
Para el diseño utilice la aplicación de código abierto FreeCAD, imprimiendo partes con una impresora 3D y utilizando una cortadora laser para conseguir unos engranajes más precisos.