La quinta edición de Servet lanzará a la estratosfera varios globos con helio en los que irán incluidas cápsulas -unidas entre sí- realizadas por distintos aficionados y makers. Se emplearan tres globos Hyowee 1600 para lanzar alrededor de diez cápsulas que dependiendo del peso y de la cantidad de helio que se introduzca en los globos llegarán más o menos lejos. Se estima alcanzar al menos los 32 km de altura. La intención es recuperar la carga que se lance, aunque eso no está garantizado.
Información de las cápsulas
Cápsula LoRa

Cápsula enlazada con estación base en tierra e info y control de deslastre en el móvil
Equipada con electroimán para suelta de lastre para ayudar a subir el globo si se necesita
Basada en Arduino Esp32 Uno
Sensores: GPS, temperatura interna
Tarjeta SD
Pantalla Oled
Electroimán para suelta de lastre
Radio LoRa 1W 868mhz
Alimentación con dos baterías li-ión
Cápsula Servet APRS

Ha volado en todos los lanzamientos para seguimiento por Aprs
Basada en Arduino Mega.Sensores: GPS, hunedad, UV, temperatura interior y exterior, presión atmosférica, giroscopio
Tarjeta SDDetector de volteo
Leds
Pantalla Oled
Zumbador
Radio corto alcance y largo alcance APRS en vhf
Alimentación con 12 pilas litio AA
Cápsula Chuck Norris Approved

Las dos sondas al final se han unificado para compartir hardware y poder subir más payload.
La parte superior, donde están los tambores, probaremos de realizar una estabilización por efecto Magnus.
A parte, se intentará incluir algún motor con hélices convencionales y probaremos algunos motores y servos para comprobar su funcionamiento en el Near Space.
También llevará un sensor inercial y un GPS para medir la posición y los ángulos de los tres ejes.
La base de la sonda llevará la segunda sonda como tal. En la que pondremos la patata y una serie de sensores que midan las condiciones ambientales.
A parte tendrá una cámara 4k, un sistema de tracker por LoRaWan y otro de backup por LoRa que también nos envía información del sistema.
GALtidude

Comparador de prestaciones de un sistema de localización basado en GPS contra un sistema basado en GALILEO, teniendo en cuenta altitudes de 0-35km.
Tiene el objetivo de demostrar que un sistema GNSS únicamente de GALILEO es preciso y fiable para HAPS (High Altitude Pseudo-Satellites.
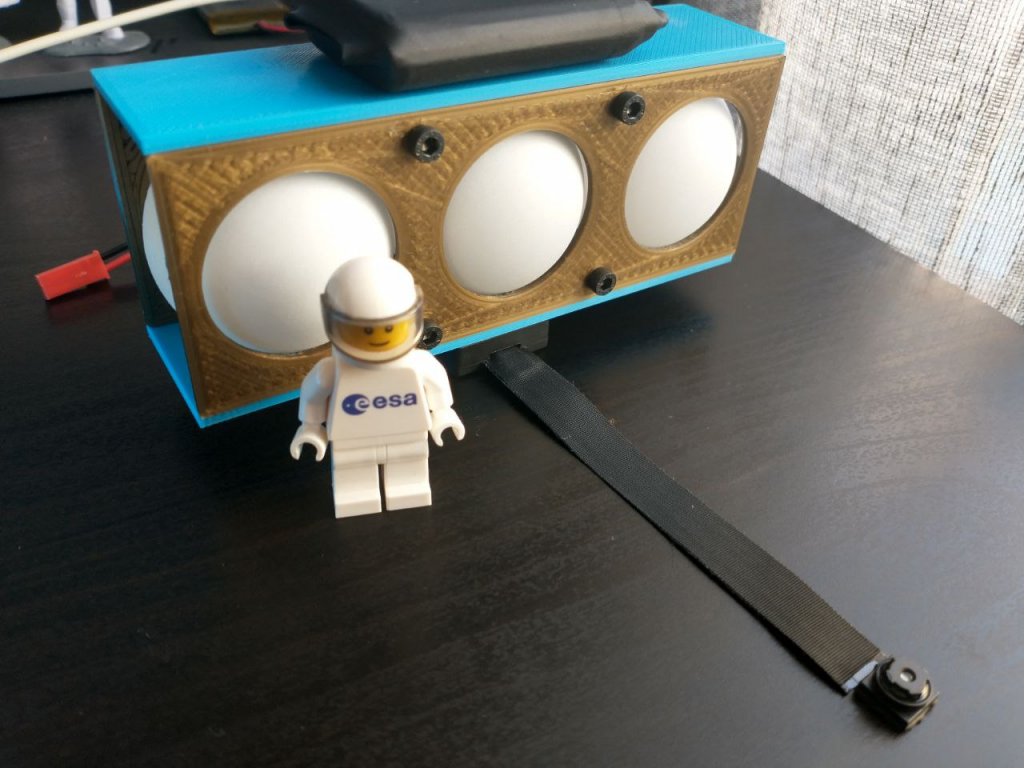
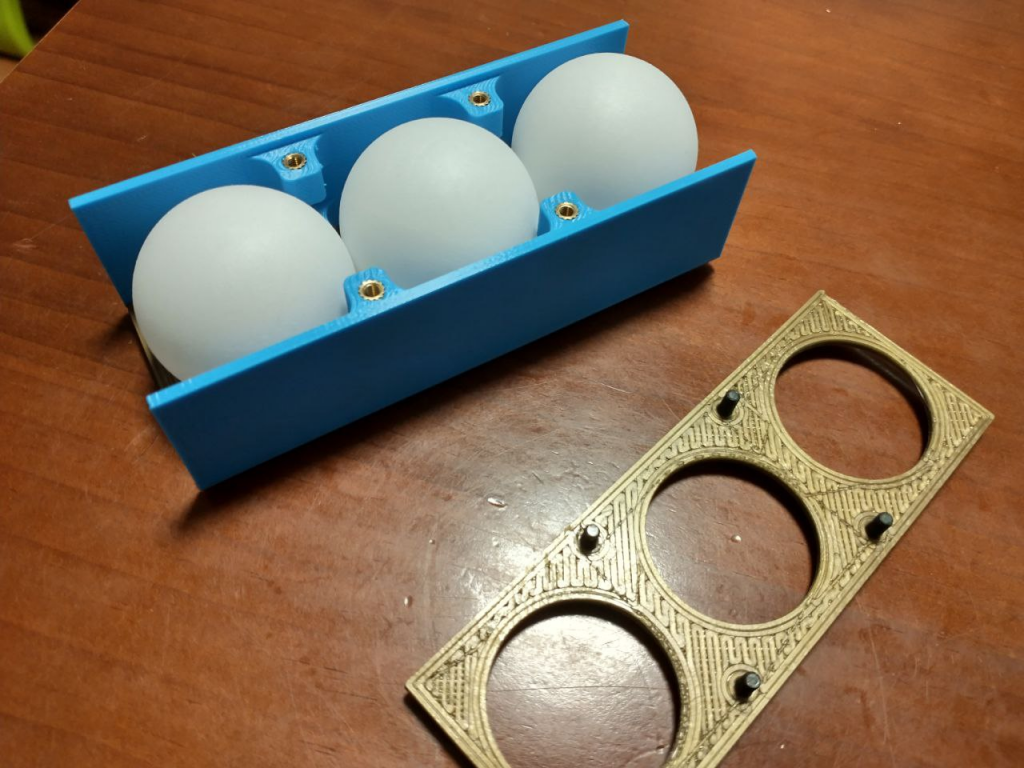
PongPod
PongPod es una plataforma educativa para llevar «nanosatélites» y «nanoturistas espaciales» a la estratosfera en forma de pequeñas pelotas de ping pong. Para esta misión la cápsula llevará tres «nanoturistas» y una cámara que hará «selfies» de la propia cápsula. Es un proyecto de Juampe López.
Servet Fluids
Habrá diferentes probetas con algunos líquidos (agua, aceite, alcohol y 2 más por elegir). Estas estarán en una parte de la cápsula de poliestireno sin cubrir por arriba. En la otra parte se pondrá una cámara grabando las probetas y un sistema Arduino para comunicación.

Por esa parte electrónica habrá un sensor de temperatura y humedad conectado a la placa Arduino y a una antena LoRa para comunicar esos datos del sensor al Arduino de tierra monitorizando.
El lugar de lanzamiento de las cápsulas se conocerá en los próximos días.