En este post recopilamos el trabajo de los participantes en Servet IX. Ciencia ciudadana al alcance de todos
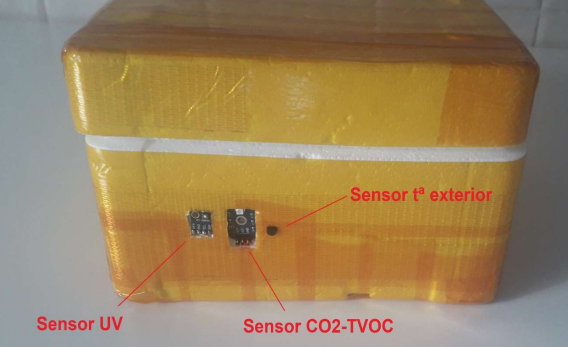
«Mi proyecto ya está casi listo para lanzar. En cuanto a la electrónica, falta añadir el módulo SD al código y los sensores de temperatura però la conexión con TTN ya funciona. Por otro lado, la caja solo le faltan dos retoques para estar lista (pajitas y alguna prueba de congelador antes de cuadrar peso). En principio, todo lo otro está terminado»
SOBC Test de Josep Curto Lapeira


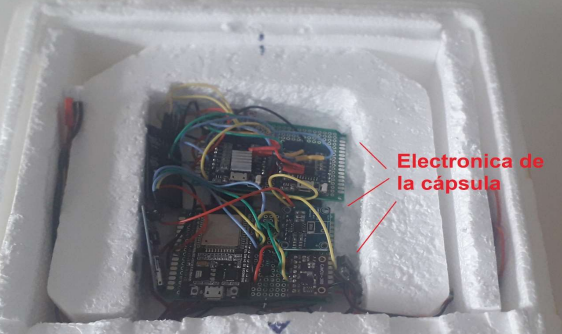
GENSAT-1 de Antonio Prieto Rodríguez
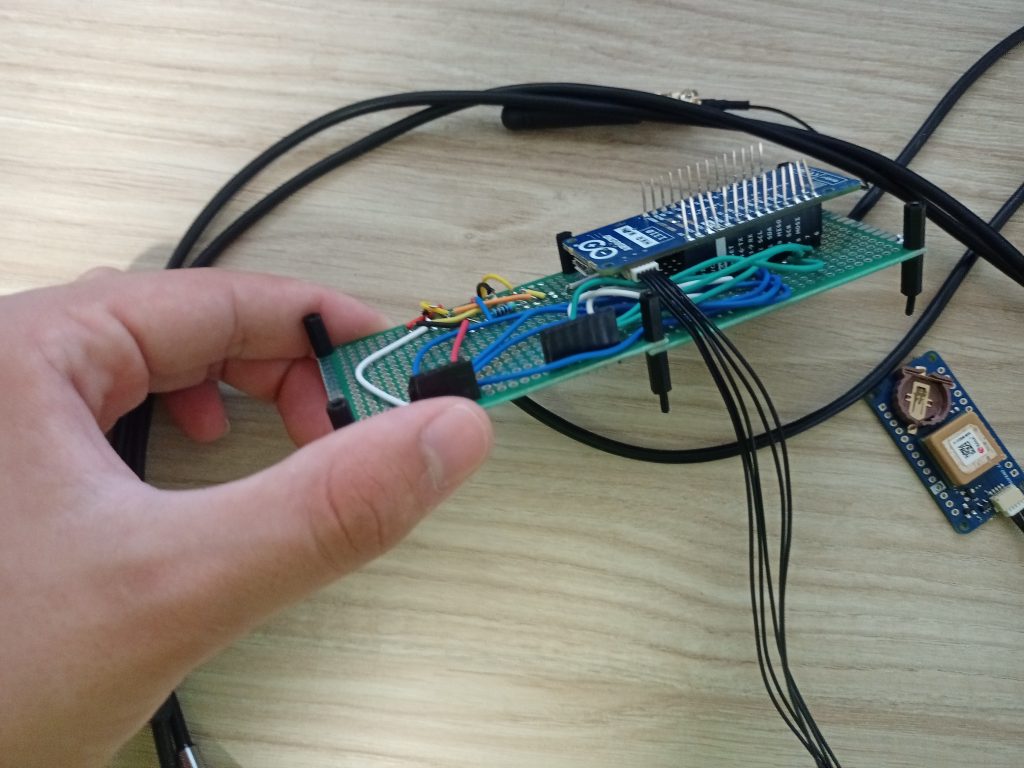
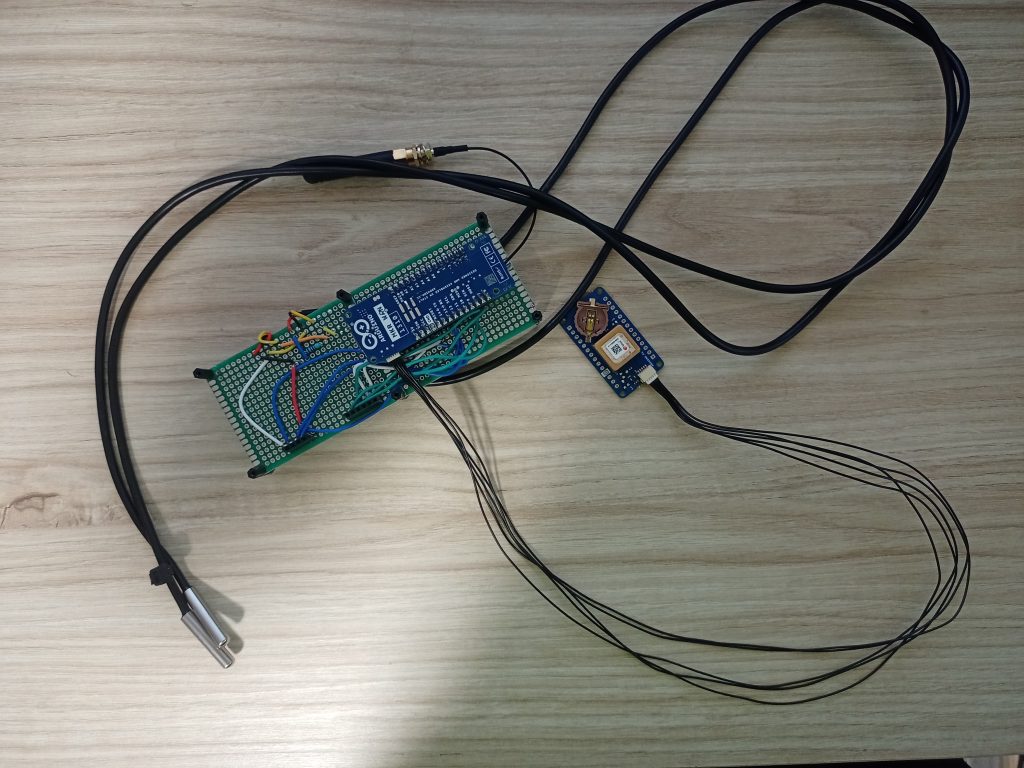
«Ell proyecto Gensat I está bastante avanzado a nivel constructivo. Falta rematar la instalación con el GPS y el transmisor de radio además de fijar la electrónica ya cableada a la cápsula. La parte de programación está lista Se han realizado pruebas de temperatura ( en arcón congelador) y de alcance radio con transmisor LORA. Falta prueba de impacto cuando todo esté listo y prueba de duración de batería a -20C cuando todo este montado»
The Air and Space Box Program de David Medina
«El objetivo principal es dar con la solución de garantizar la estabilidad de las cápsulas en su ascenso hasta la estratósfera y así proporcionar una plataforma estable mientras recopilan información sobre el entorno atmosférico y la realización de experimentos. En esta ocasión, hemos adoptado un enfoque alternativo al tradicional «Efecto Magnus», que previamente hemos investigado en las misiones Servet 5 y 7 ya que este acusa una disminución en su eficiencia a medida que la sonda asciende. El principio fundamental en el que se basa este experimento reside en la compresibilidad del aire o de gases inertes, como el helio (He). Este enfoque novedoso tiene como objetivo lograr la mayor eficiencia a altitudes máximas. Además de esta innovación, la sonda albergará otros experimentos, incluyendo la evaluación de nuestro nuevo software de seguimiento a través de la red TTN y de predicción del punto de recogida».

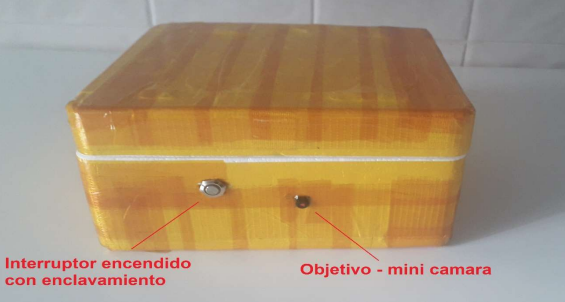
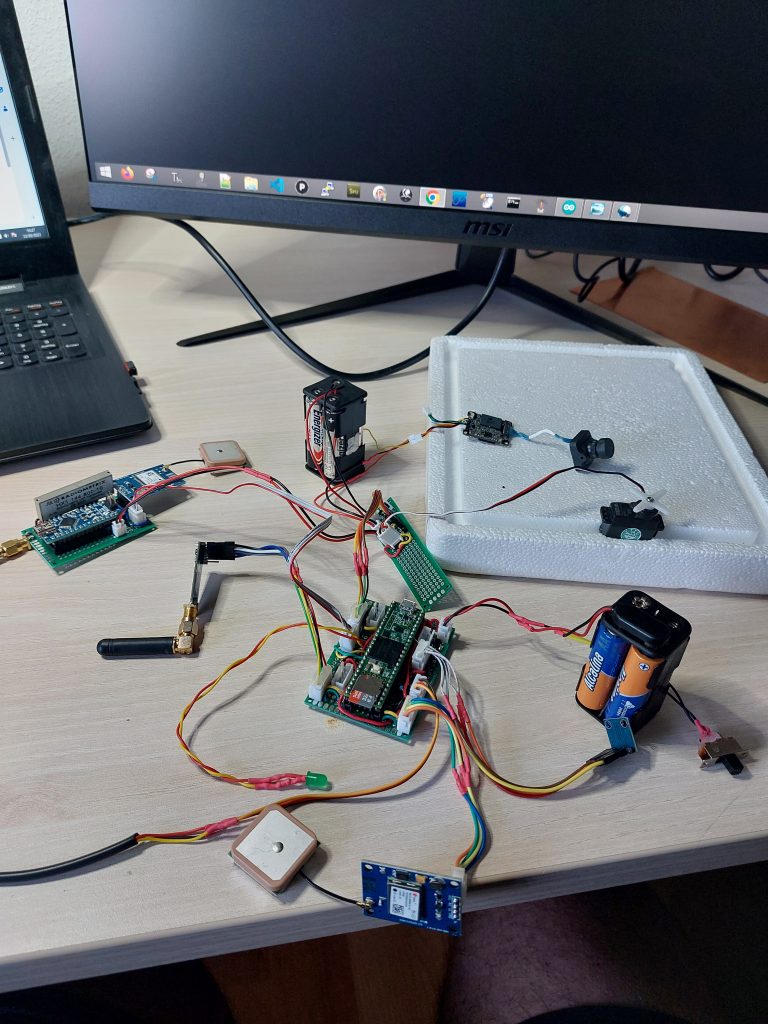
StarDust de César Rangil López
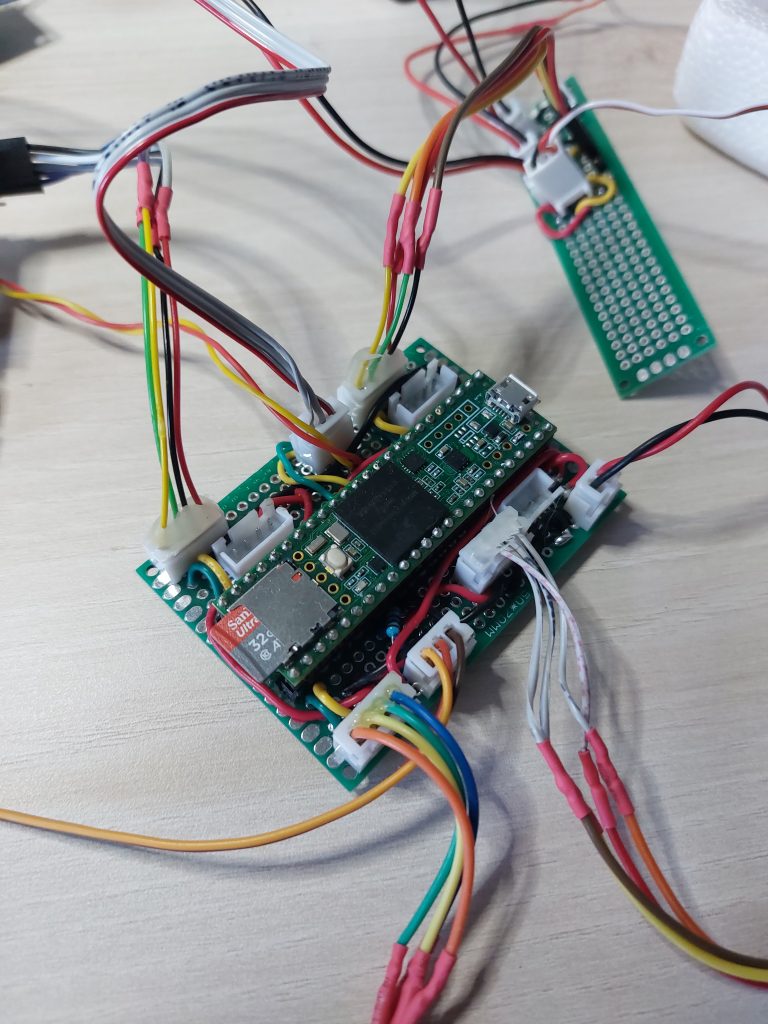
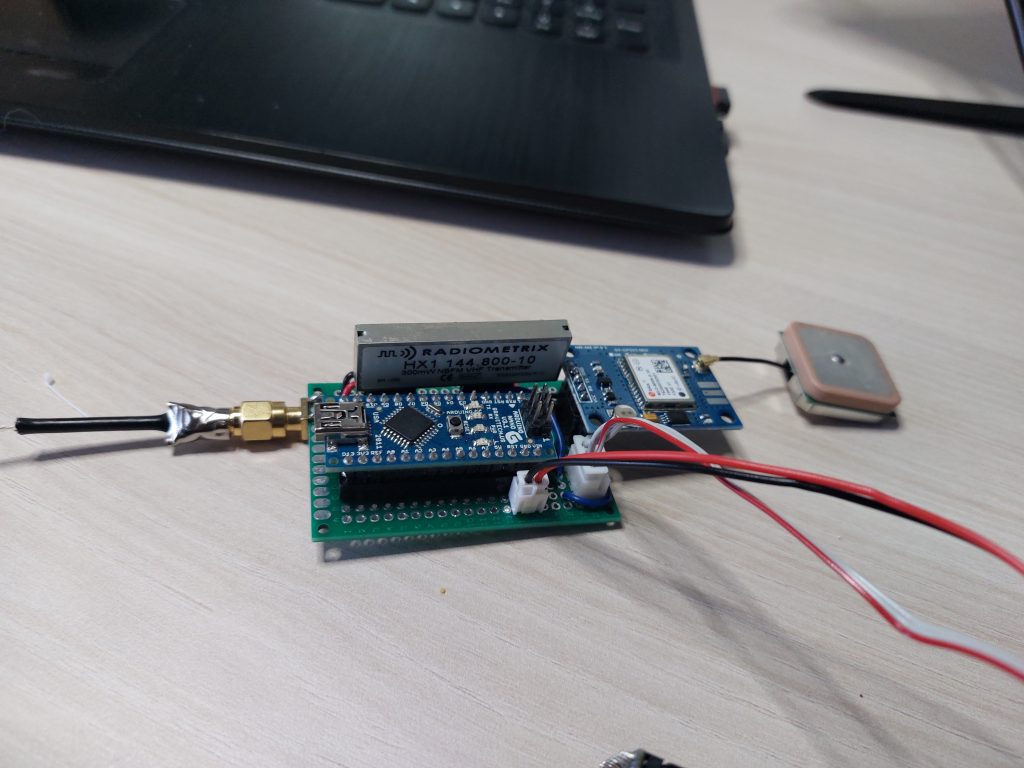
«Prácticamente la parte electrónica de la sonda está finalizada. Cuenta con un módulo APRS controlado por un arduino Nano que recibe los datos del procesador principal (teensy 3.5) vía serie y emite a 144.800Mhz la posición, altitud, velocidad y rumbo de la sonda además de otros valores de los sensores (Vcc, Ti, Te, P…) Los sensores son: Posición (latitud, longitud, altitud) y hora: GPS Neo 8M,Presión atmosférica: BMP180, Temperatura interior de la cápsula: BMP180, Temperatura exterior: DS18B20. La cámara elegida es una Baby Turtle HD».
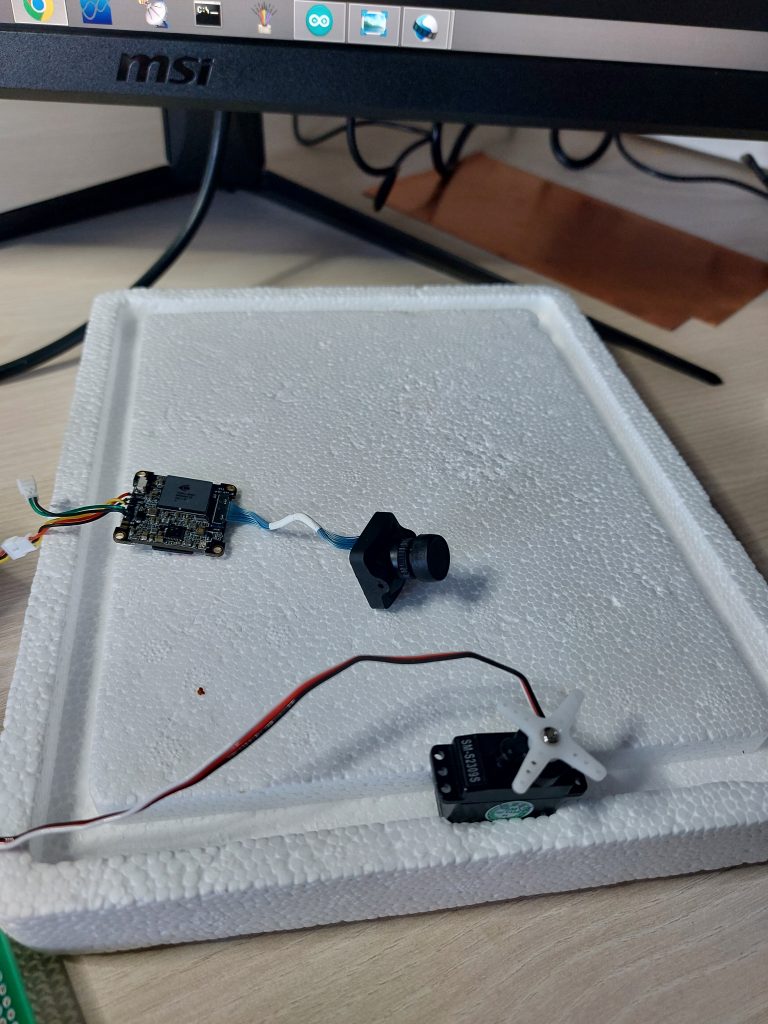
Queda pendiente: Diseño de la placa de toma muestras que irá montada por un miniservo y que cambiará de posición en función de la altitud que tenga en cada momento la sonda. Integración de todos los componentes en la estructura de poliestireno extruido. Prueba integral de todos los subsistemas.

Javier Briz: cápsula con mecanismo para cortar el hilo del globo (de esta forma las cápsulas no se pierden)

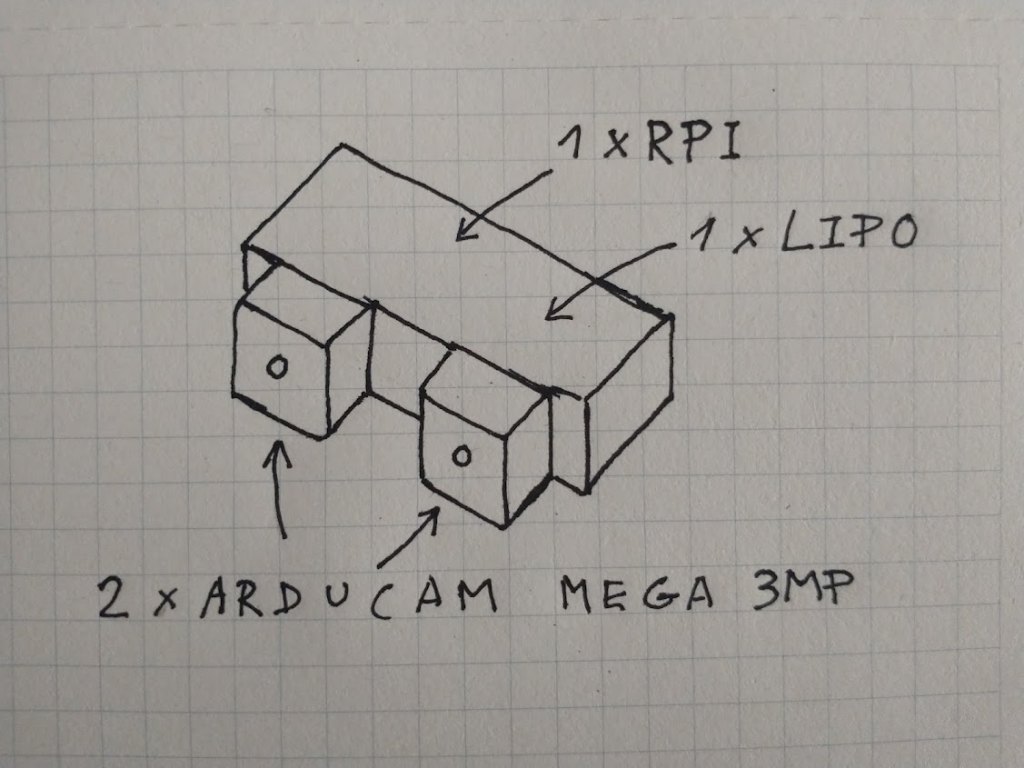
S3I (Servet’s Stratospheric Stereoscopic Imager) de Juampe López
«La cápsula tomará imágenes estereoscópicas (ojo izquierdo y ojo derecho) de la estratosfera y las almacenará para poder experimentar con ellas después del aterrizaje mediante visión por computador. Para ello, utilizaremos dos cámaras Arducam de 3MP controladas por una placa Raspberry Pi Zero W mediante bus SPI. Como curiosidad, esta Raspberry Pi ya voló a la estratosfera en un vuelo anterior del proyecto Servet. En la fase actual se ha empezado a diseñar la cápsula como tal «a papel y lápiz» como paso previo al diseño CAD en 3D con las dimensiones correctas y necesarias para todos los componentes. También se ha empezado a investigar todas las opciones para la programación de la placa (probablemente C sobre Linux) ya que se dispone tanto de las cámaras como de la placa. En la próxima fase esperamos disponer de imágenes tomadas por las cámaras y poder hacer una pequeña demostración del efecto 3D estereoscópico, así como de un prototipo de la cápsula».